I recently wanted to try semi-supervised learning on a research problem.
In Improved Techniques for Training
GANs the authors show how a deep
convolutional generative adversarial
network, originally intended for
unsupervised learning, may be adapted for semi-supervised learning. It
wasn’t immediately clear to me how the equations in Section 5 of the
paper are equivalent to OpenAI’s
implementation, so I decided
to go through the derivation myself. In this post, I’ll show how the
supervised and unsupervised loss functions in the implementation may be
derived from the equations provided in the paper. If you’re already familiar with the background, skip ahead to the supervised loss or unsupervised loss derivation.
I’ve previously written about adversarial
learning and others
have written several good posts about semi-supervised learning with deep
convolutional generative adversarial networks (DCGANs), so it would be
superfluous for me to cover the architecture and optimization. Thus,
I’ll only provide enough background necessary to understand the loss
function. Those interested in a more thorough discussion with
TensorFlow
code
might want to read Thalles Silva’s blog
post, Semi-supervised learning with Generative Adversarial Networks
(GANs).
Background
Unlike supervised learning, where we have labels for all training
examples, and unsupervised learning, where we don’t have any labels at
all, in semi-supervised learning we have labels for some, but not all,
training examples. Clearly, we should extract any useful information
that is available from the unlabeled examples, even if we don’t know
their labels explicitly. Thus, training a semi-supervised DCGAN for
classification consists has four parts, namely
the discriminator must predict the correct label for those training examples with labels (exactly like supervised learning),
the discriminator must verify that the unlabeled training examples were drawn from the original data distribution, i.e., belong to one of the known classes even if we don’t know which one,
the discriminator must claim that samples drawn from the generator are fake, i.e., do not belong to one of the known classes, and finally,
the generator must continually improve its fake samples to fool the discriminator into thinking that they are real.
Taken together, the idea is that the discriminator acts as a conventional multi-class classifier, while simultaneously learning to map the unlabeled training examples to the same feature distribution.
Deriving the Loss Functions
To realize the four points described above with a differentiable loss
function, the authors of Improved Techniques for Training
GANs propose using a $K+1$-class
classifier, where the first $K$ outputs correspond to the probabilities
of the $K$ classes. Effectively, this means that the sum over the first
$K$ outputs may be interpreted as the probability that the given example
is real, and the output at $K+1$ as the probability that the example is
fake. They note, however, that such a classifier is over-parameterized.
This is analogous to how a binary classifier requires only a single
output neuron to produce the probabilities of the two classes. Thus,
the same result may be achieved using a $K$-class classifier as the
discriminator. Although the derivation is straightforward, it’s easy to
see this with a small code example:
# Not a numerically stable implementation of softmax, just as an example.
>>>defsoftmax(x):>>>returnnp.exp(x)/np.sum(np.exp(x))>>>x=np.random.random(8)# Probabilities do not change if we shift them such that final logit is 0.
>>>np.allclose(softmax(x),softmax(x-x[-1]))True
Supervised Loss
With a $K$-class classifier, the supervised loss simply becomes the categorical cross-entropy loss. Let $\mathbf{x} \in [-1, 1]^{H \times W \times 3}$ be a single training example (an RGB-image normalized to the same range as the generator’s output) and $\mathbf{y} \in \{0, 1\}^{K} \mid \sum\limits_{i=1}^{K}y_i = 1$ (a one-hot vector indicating to which class $\mathbf{x}$ belongs). The discriminator takes the input $\mathbf{x}$ and produces the $K$-dimensional vector of logits $l(\mathbf{x})$ at the final layer. The predicted probability $\hat{y}_j$ for class $j$ is computed using the softmax function
which we substitute into the categorical cross-entropy loss
Because $\mathbf{y}$ is a one-hot vector, we know that it is zero
everywhere except for the index representing the class to which
$\mathbf{x}$ belongs. Let this index be $j’$, such that $y_i = 0 \quad\forall_{i \neq j’}$ and $y_{j’} = 1$. All terms in the outer summation become zero except for $j = j’$, and so the loss function may be simplified to
After taking the average over all training examples in the minibatch, this gives us the supervised loss function provided in the implementation.
Because we’re simply going to average the loss over the minibatch
anyway, we compute the loss for a single example to keep things simple.
Let $\mathbf{x}_{real} \in [-1, 1]^{H \times W \times 3}$ be a single
training example (for which we don’t know the label) and
$\mathbf{x}_{fake} \in [-1, 1]^{H \times W \times 3}$ be a single
example sampled from the generator. For the unsupervised loss, the
discriminator must maximize the log-probability that $\mathbf{x}_{real}$
is real and minimize the log-probability that $\mathbf{x}_{fake}$ is real,
where $D(\mathbf{x})$ is simply the softmax over the $K$ logits and a
dummy logit fixed to $l_{k+1}(\mathbf{x}) = 0$ that appears as $e^0 = 1$ in the denominator to represent the “fake” class, i.e.,
where
is the sum of the exponents of the logits representing the “real” classes. Substituting and simplifying, we get
Noting that $\log\left(\sum\limits_{k=1}^{K}e^{l_k(\mathbf{x})} + 1\right) =
\text{Softplus}\left(\log\sum\limits_{k=1}^{K}e^{l_k(\mathbf{x})}\right)$, we get
After averaging each term over all examples in the minibatch and scaling by $0.5$
to account for the fact that we have effectively doubled the batch size
relative to the supervised loss, we get the unsupervised loss defined in the
implementation.
Initially developed for unsupervised representation learning, deep
convolutional generative adversarial networks have been shown also to be
effective for semi-supervised learning. Although the combination of
supervised and unsupervised losses presented in Section 5 of Improved
Techniques for Training GANs may
initially seem not to resemble those in the official
implementation, careful
derivation makes the equivalence clear.
This is a simple post about how to pipe the output of a command to the clipboard
on Ubuntu, i.e., a way to get the output of a command such as
readlink-f 2007_000027.jpg # gets the canonical path
to the clipboard without using the mouse. If you just want the command, skip
ahead to the bash alias.
The Problem
When designing computer vision (and other) algorithms, one often encounters
strange edge cases — situations where an algorithm that has successfully
processed thousands of images fails spectacularly on one particular input.
Generally, a quick check of the problem image in an image viewer like
feh or an interactive
shell like IPython can identify some of the more common
bugs (corrupted image data, integer overflow/underflow, etc.).
Getting a specific image into IPython, for example, requires first selecting
the filepath with the mouse (drag-select or double-click), copying with
Ctrl-Shift-C, and then loading it with something like:
img=cv2.imread('<Ctrl-Shift-V here>')
Without starting a flame war (Is using a mouse less
efficient?),
I find the keyboard to be significantly faster than the mouse for
frequently-used commands in a keyboard-friendly environment, like
vim and i3.
As a result, I want to achieve the above without using the mouse.
The Solution
A quick Google
search
reveals that
xclip is a good
place to start. A good idea, however, is first to strip any trailing
newline
from the input to ensure that it is not interpreted as a command. Thus, the
full command becomes
Someone recently suggested to me the possibility of training a char-rnn on
the entire history of my Facebook conversations. The idea would be to see
if the result sounds anything like me. When I first started out, my idea
was simply to use one of the existing char-rnn implementations, for
example this one written using
Torch, or
this one, written using Lasagne and
Theano.
Along the way, however, I decided that it would be a good learning
experience to implement a char-rnn myself. If you’re only interested in the code, it’s available on Github.
As a result, this post now consists of two parts. The first provides a
very brief overview of how a char-rnn works. I keep it brief because
others have already done excellent work to provide extensive insights into the
details of a char-rnn, for example, see this blog post by Andrej Karpathy. The second describes how I trained this char-rnn
on my own Facebook conversations, and some of the things I discovered.
Background of char-rnn
In this section, I’ll provide a very brief overview of how a char-rnn
works. If you’re interested in an extensive discussion instead, I
recommend that you rather read the blog
post mentioned
above.
The term “char-rnn” is short for “character recurrent neural network”, and
is effectively a recurrent neural network trained to predict the next
character given a sequence of previous characters. In this way, we can
think of a char-rnn as a classification model. In the same way that we
output a probability distribution over classes when doing image
classification, for a char-rnn we wish to output a probability
distribution over character classes, i.e., a vocabulary of characters.
Unlike image classification where we are given a single image and expected
to predict an output immediately, however, in this setting we are given
the characters one at a time and only expected to predict an output after
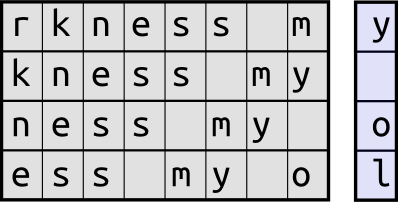
the last character. This is illustrated below. Consider the sequence of characters, “Hello darkness my old friend”, where the sequence of characters marked in bold are observed by the model. At each step, the model observes a sequence of eight characters (show on the left) and is asked to predict the next one (on the right).
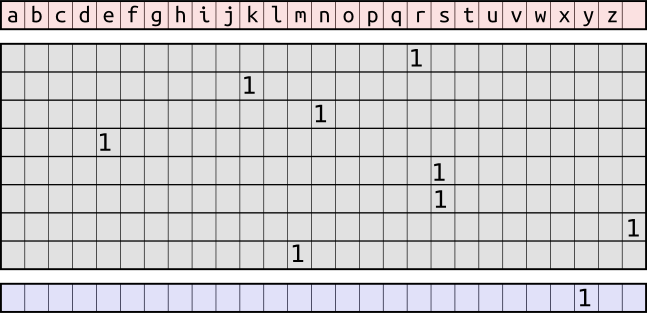
In practice, each character is typically encoded as a one-hot vector, where the position of the one indicates the position of the character in the vocabulary. For example, in a vocabulary consisting of the twenty-six lower-case letters and space, the first row of the sequence above would be encoded as demonstrated in the figure below. Note that zeros are represented by empty cells to reduce clutter. The top row shows the characters in the vocabulary, the grid shows each character in the sequence converted to its one-hot representation, and the bottom row shows the target character’s one-hot representation.
Because this is effectively a classification task, where the output
classes are characters in the vocabulary, we use the standard categorical
cross-entropy loss to train the model. If we let $\mathbf{y}$ be a vector representing the one-hot encoding of the target character and $\mathbf{\hat{y}}$ the vector of probabilities over the $n$ characters in the vocabulary as produced by the output layer of the char-rnn, then the loss for a single target character is defined as $-\sum\limits_{i=1}^{n}y_i\log(\hat{y}_i)$.
By iteratively minimizing this loss, we obtain a model that predicts
characters consistent with the sequences observed during training. Note that
this is a fairly challenging task, because the model starts with no prior
knowledge of the language being used. Ideally, this model would also
capture the style of the author, which we explore next.
Training a char-rnn on my Facebook Conversations
After implementing a char-rnn as described above, I decided to train it on the entire history of my Facebook conversations. To do this, I first downloaded my chat history. This can be achieved by clicking on “Privacy Shortcuts”, “See More Settings”, “General”, and finally “Download a copy of your Facebook data”. These instructions are available here.
Now unzip the downloaded archive and parse it. The filepath should point to the messages.htm file inside the unzipped archive.
fbcap html/messages.htm > messages.txt
At this point, you have a text file messages.txt containing the data, sender, and text
of every message from your Facebook conversation history. To train the
char-rnn, however, I wanted to train only on messages written by me. To
do this, I used the this code snippet to parse out messages
indicating me as the sender. You can use this snippet too, or write your
own, more sophisticated parser if you want more control over which
messages to use for the training data.
Finally, set the text_fpath variable in the train_char_rnn.py file, and run python train_char_rnn.py. At first, the output will be mostly gibberish, with alternating short words repeated for the entire sequence. I started seeing somewhat more intelligible output after about twelve hours of training on an NVIDIA TITAN X.
Results
After training the model on the entire history of my Facebook conversations, we can generate sequences from the model by feeding an initial sequence and then repeatedly sampling from the model. This can be done by using the generate_samples.py file. Set the text_fpath to the same text file used to train the model (to build the vocabulary), and run python generate_samples.py.
Next, we show some samples from the model. The phrase used to initialize the model is shown in italics.
The meaning of life is to
find them?
Oh, I don’t know if I would be able to publish a paper on that be climbing today, but it will definitely know what that makes sense. I’m sure they wanted to socialis that I am bringing or
What a cruel twist of fate, that we should
be persuate that 😂
And cook :D
I will think that’s mean I think
I need to go to the phoebe?
That’s awesome though
Haha, sorry, I don’t know if it was more time to clas for it’s badass though
I jus
The fact of the matter is
just the world to invite your stuff?
I don’t know how to right it wouldn’t be as offriving for anything, so that would be awesome, thanks :) I have no idea… She would get to worry about it :P
And I
At the very least, you should remember that
as a house of a perfect problems 😂
Yeah :D
I wonder how perfect for this trank though
So it’s probably foltower before the bathers will be fine and haven’t want to make it worse
Thanks for one of
Looking at these samples, it would appear as if the model has learned decent spelling and punctuation, but struggles to formulate sensible sentences. I suspect that the training data was too limited, as the entire text file is only about 1.5MB. Additionally, unlike email, Facebook messages often consist of short replies rather than multiple, full sentences. At the end of the day, I highly doubt I could fool anyone by having the char-rnn auto-reply to them. On the other hand, I don’t think releasing a model that’s been trained on every message I’ve ever sent would be a good idea either.
Some time ago I read an interesting paper about Adversarial
Autoencoders, written by Alireza Makhzani,
Jonathon Shlens, Navdeep Jaitly, and Ian Goodfellow. The idea I find most
fascinating in this paper is the concept of mapping the encoder’s output
distribution $q(\mathbf{z}|\mathbf{x})$ to an arbitrary prior distribution $p(\mathbf{z})$ using
adversarial training (rather than variational inference).
I had some time available recently and decided to implement one myself using
Lasagne and
Theano. If you’re only interested in the
code, it’s available on
GitHub.
At the simplest level, an
autoencoder is simply a neural
network that is optimized to output the input that it is provided with, or
stated alternatively, optimimized to reconstruct its input at the output layer.
Typically this is implemented as two separate neural networks, namely the
encoder and the decoder. The encoder takes the input and transforms it
to a representation that has certain useful characteristics. The decoder, on
the other hand, transforms the output of the encoder back to the original
input. To avoid simply learning the identity function, certain constraints are
usually placed on the output of the encoder. For example, if the
dimensionality of the encoder’s output is smaller than the dimensionality of
the input, the encoder is forced to compress the input in such a way that it still preserves as
much of the information in the input as possible. In this case, the encoder
can be used to project the data to a lower-dimensional space (similar to
principal component
analysis).
Alternatively, we can use the Kullback-Leibler
divergence
to encourage the encoder’s output to resemble some prior distribution that we
choose. Such autoencoders are referred to as variational
autoencoders.
Autoencoders as Generative Models
We have already briefly mentioned that the properties of the encoder’s output
allow us to transform input data to a useful representation. In the case of a
variational autoencoder, the decoder has been trained to reconstruct the input
from samples that resemble our chosen prior. Because of this, we can sample
data points from this prior distribution, and feed these into the decoder to
reconstruct realistic looking data points in the original data space.
Unfortunately, variational autoencoders often leave regions in the space of the
prior distribution that do not map to realistic samples from the data.
Adversarial autoencoders aim to improve this by encouraging the output of the
encoder to fill the space of the prior distribution entirely, thereby allowing
the decoder to generate realistic looking samples from any data point sampled
from the prior. Instead of using variational inference, adversarial autoencoders do this by introducing two new components, namely the discriminator and the generator. These are discussed next.
Implementation of an Adversarial Autoencoder
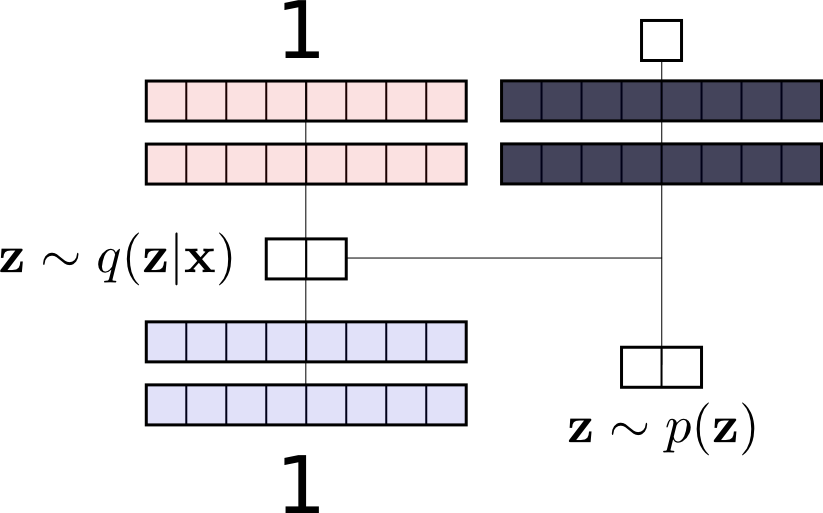
Below we demonstrate the architecture of an adversarial autoencoder. The left
part of the diagram shows the encoder/decoder pair, where an input vector
$\mathbf{x}$, the digit “1” in this case, is fed in as input to the encoder,
transformed to the code $\mathbf{z}$ by the encoder, and then fed to the
decoder that transforms it back to the original data space. On the right, a
sample $\mathbf{z}$ is drawn from the prior distribution $p(\mathbf{z})$. The
discriminator is optimized to separate the samples drawn from the prior
distribution $p(\mathbf{z})$ from the samples drawn from the encoder
distribution $q(\mathbf{z}|\mathbf{x})$.
For every minibatch, there are three important events:
A minibatch of input vectors is encoded and decoded by the encoder and decoder, respectively,
after which both the encoder and decoder are updated based on the standard
reconstruction loss.
A minibatch of input vectors is transformed by the encoder, after which the minibatch
is concatenated with code vectors sampled from the prior distribution. The discriminator is then updated
using a binary cross-entropy loss based on its ability to separate those samples generated by the encoder
from those sampled from the prior distribution.
A minibatch of input vectors is transformed by the encoder, the source of these data points is predicted by
the discriminator, and the generator (which is also the encoder) is updated using a binary cross-entropy loss
based on its ability to fool the discriminator into thinking the data points came from the prior distribution.
It is interesting to note that the reconstruction loss drops fairly
consistently throughout training. The adversarial losses (generative and
discriminative, respectively), on the other hand, remain roughly constant after
some initial fluctuation. This is the result of the adversarial training, where
the discriminator’s improvement is countered by the generator’s improvement, leading
to the convergence of both.
Experiments
To explore some of the properties of an adversarial autoencoder, we train it on
the MNIST handwritten digit data set. The architecture we use is as described
here
by the author. We use two neurons in the encoder’s output layer and draw
samples from a two-dimensional uniform random distribution.
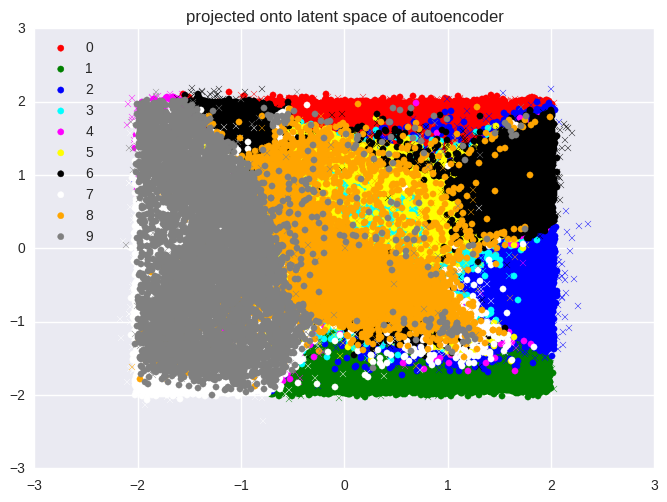
First, we show the images from the MNIST handwritten digit data set projected
onto the two axes represented by the two neurons in the output of the encoder.
Because we are projecting the 784-dimensional input vectors to 2-dimensional
vectors, there is a lot of overlap between the classes. We clearly see,
however, that practically all the data points from the training set (indicated
by circles) lie within the bounds of the prior distribution. Note that some of
the points from the test set (indicated by crosses) lie outside this region.
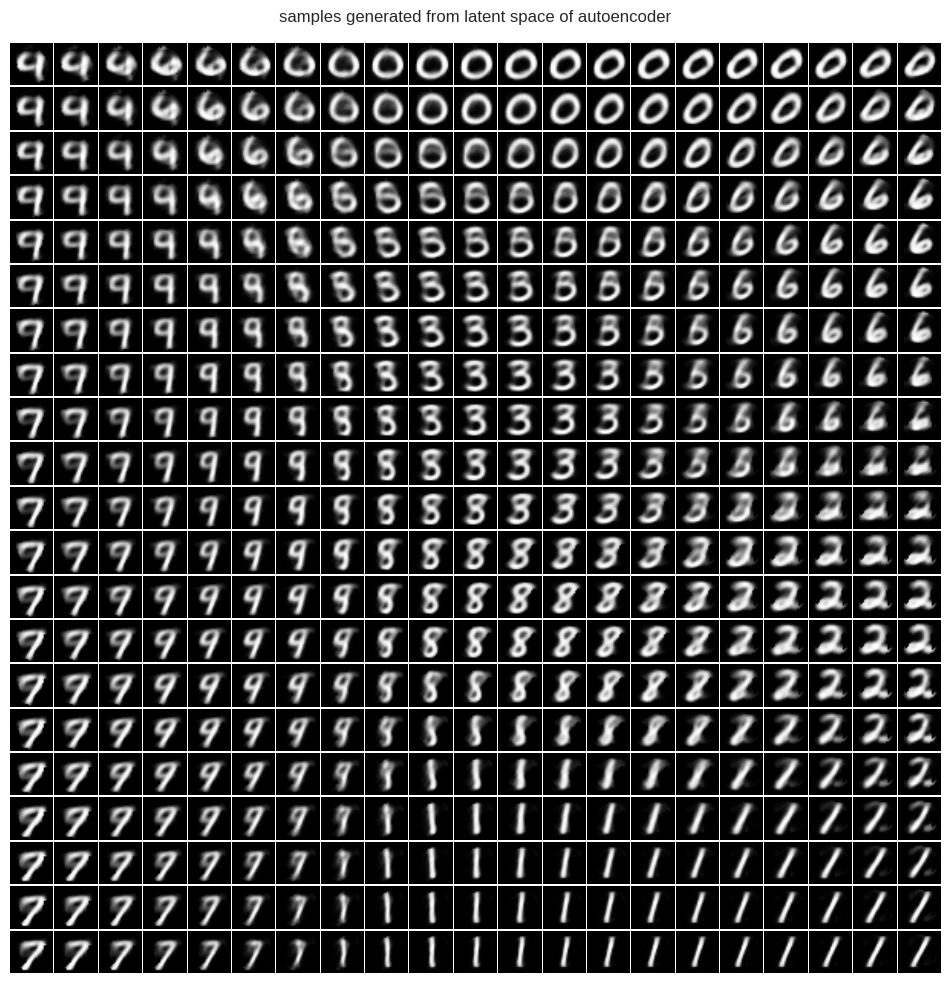
Next, we traverse the two axes of our prior distribution, sampling points from
a regularly-spaced grid. For each sample, we use the decoder to generate a
sample in the original data space. Note how the generated digits in each
region correspond to the mapped regions of digits in the space represented by
the encoder’s output.
Summary and Further Reading
We briefly discussed autoencoders and how they can be used as
generative models, and then continued to describe how we can use
adversarial training to impose constraints on the output distribution
of the encoder. Finally, we demonstrate the ten digit classes of MNIST projected onto the encoder’s output distribution, and then traverse this space to generate realistic images in the original data space.
Those interested in further reading might want to take a look at the following links:
A discussion by the author on /r/machinelearning. This provides a detailed guide to implementing an adversarial autoencoder and was used extensively in my own implementation.
As part of my research on applying deep learning to problems in computer
vision, I am trying to help plankton researchers accelerate the annotation of
large data sets. In terms of the actual classification of plankton images,
excellent progress has been made recently, largely thanks to the popular 2015
Kaggle National Data Science Bowl.
In this competition, the goal was to predict the probability distribution
function over 121 different
classes of plankton, given a
grayscale image containing a single plankton organism. The winning team’s
solution is of particular
interest, and the code is available on
GitHub.
While this progress is encouraging, there are challenges that arise when using
deep convolutional neural networks to annotate plankton data sets in practice.
In particular, unlike in most data science competitions, the plankton species
that researchers wish to label are not fixed. Even in a single lake, the
relevant species may change as they are influenced by seasonal and
environmental changes. Additionally, because of the difficulties involved in
collecting high-quality images of plankton, a large training set is often
unavailable.
For the reasons given above, for any system to be practically useful, it has to
recognize when an image presented for classification contains a species that
was absent during training,
acquire the labels for the new class from the user, and
extend its classification capabilities to include this new class.
In this post, we consider the first point above, i.e., how we can quantify the
uncertainty in a deep convolutional neural network. A brief overview with links to the relevant sections is given below.
Background: why interpreting softmax output as confidence scores is insufficient.
Although it may be tempting to interpret the values given by the final softmax
layer of a convolutional neural network as confidence scores, we need to be
careful not to read too much into this. For example, consider that recent work
on adversarial examples has shown that
imperceptible perturbations to a real image can change a deep network’s softmax
output to arbitrary values. This is especially important to keep in mind when
we are dealing with images from classes that were not present during training.
In Deep Neural Networks are Easily Fooled: High Confidence Predictions for
Unrecognizable Images, the authors explain
how the region corresponding to a particular class may be much larger than the
space in that region occupied by training examples from that class. The result
of this is that an image may lie within the region assigned to a class and so
be classified with a large peak in the softmax output, while still being far
from images that occur naturally in that class in the training set.
Bayesian Neural Networks
In an excellent blog
post, Yarin Gal explains how we can use dropout in a
deep convolutional neural network to get uncertainty information from the
model’s predictions. In a Bayesian neural network, instead of having fixed
weights, each weight is drawn from some distribution. By applying dropout to
all the weight layers in a neural network, we are essentially drawing each
weight from a Bernoulli
distribution. In
practice, this mean that we can sample from the distribution by running several
forward passes through the network. This is referred to as Monte Carlo
dropout.
Experiments
Quantifying the uncertainty in a deep convolutional neural network’s
predictions as described in the blog post mentioned above would allow us to
find images for which the network is unsure of its prediction. Ideally,
when given a new unlabeled data set, we could use this to find images that belong
to classes that were not present during training.
We train the model on the 50000 training images and used the 10000 test images
provided in CIFAR-10 for validation. All parameters are the same as in the
implementation provided with the
paper,
namely a batch size of 128, weight decay of 0.0005, and dropout applied in all
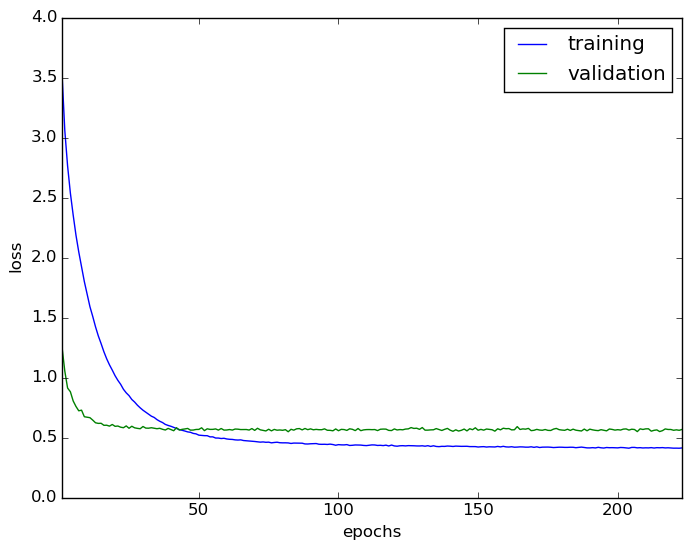
layers with $p = 0.5$. The learning rate is initially set to $l = 0.01$, and
is updated according to $l_{i+1} = l_{i} (1 + \gamma i)^{-p}$, with $\gamma =
0.0001$ and $p = 0.75$, after the $i$th weight update. The learning curve is
shown below. The best validation loss is 0.547969 and the corresponding
training loss is 0.454744.
The learning curve for the model trained on the CIFAR-10 training set and evaluated on the CIFAR-10 test set.
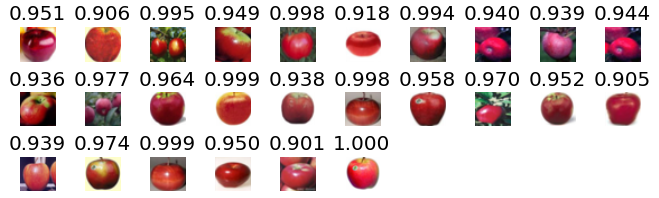
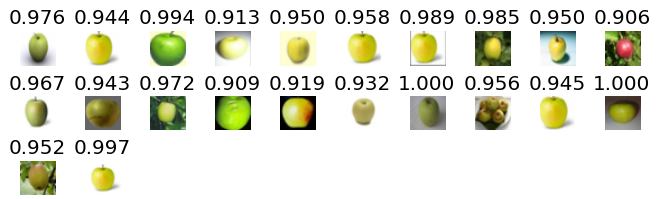
Now that we have a deep convolutional network trained on the ten classes of
CIFAR-10, we present images from the apple class from CIFAR-100 to the
network. We run $T=50$ stochastic forward passes through the network and take
the predictive mean of the softmax output. The results, while a little
discouraging, are amusing. It seems that the network is very happy to classify
red apples as automobiles, and green apples as frogs with low uncertainty.
Below we show apples that were classified as automobiles with $p >
0.9$, and then similarly for frogs. The number above each image is the maximum of the
softmax output, computed as the mean of the 50 stochastic forward passes.
CIFAR-100's apple misclassified as CIFAR-10's automobile class with $p > 0.9$.CIFAR-100's apple misclassified as CIFAR-10's frog class with $p > 0.9$.
Code
All of the code used in the above experiment is available on
GitHub. The non-standard
dependencies are Lasagne,
Theano,
OpenCV (for image I/O), and
Matplotlib.
Discussion
It is clear that the convolutional neural network has trouble with images that appear at least somewhat
visually similar to images from classes that it saw during training. Why these misclassifications are
made with low uncertainty requires further investigation. Some possibilities are mentioned below.
With only ten classes in CIFAR-10, it is possible that the network does not need to learn highly
discriminative features to separate the classes, thereby causing the appearance of these features in
another class to lead to a high-confidence output.
The saturating softmax output leads to the same output for two distinct classes (one present and one absent
during training), even if the input to the softmax is very different for the two classes.
The implementation of a Bayesian neural network with Monte Carlo dropout is too crude of an approximation
to accurately capture the uncertainty information when dealing with image data.
Conclusion
To build a tool that can be used by plankton researchers to perform rapid annotation of large plankton
data sets, we need to quantify the uncertainty in a deep learning model’s predictions to find images
from species that were not present during training. We can capture this uncertainty information with
a Bayesian neural network, where dropout is used in all weight layers to represent weights drawn from
a Bernoulli distribution. A quick experiment to classify a class from CIFAR-100 using a model trained
only on the classes from CIFAR-10 shows that this is not trivial to achieve in practice.
Hopefully we shall be able to shed some light on the situation and address some
of these problems as the topic of modeling uncertainty in deep convolutional
neural networks is explored more in the literature.